Potrzebne komponenty do projektu
Połączenie
Arduino i silnika krokowego wymaga kilku podstawowych elementów, które zapewnią precyzyjne sterowanie ruchem. Właściwy dobór komponentów jest kluczowy dla osiągnięcia optymalnej wydajności i niezawodności układu.
Przed rozpoczęciem projektu warto upewnić się, że mamy wszystkie niezbędne części oraz odpowiednie narzędzia montażowe. Dokładne zaplanowanie projektu pozwoli uniknąć niepotrzebnych opóźnień i problemów podczas realizacji.
-
Silnik krokowy - dostępny w wariantach unipolarnym lub bipolarnym, typowo o napięciu 12V
- Płytka Arduino (UNO lub NANO) - stanowi "mózg" całego układu
- Sterownik silnika (np. A4988 lub DRV8825) - kontroluje zasilanie cewek silnika
- Zasilacz 12V - zapewnia odpowiednie napięcie dla silnika
- Przewody połączeniowe - minimum 8 sztuk do podstawowej konfiguracji
Warto zaopatrzyć się również w dodatkowe akcesoria, takie jak radiator dla sterownika czy złącza śrubowe. Elementy te znacząco ułatwią montaż i zapewnią lepsze odprowadzanie ciepła z układu.
Jak działa silnik krokowy?
Silnik krokowy wykorzystuje zjawisko elektromagnetyzmu do generowania ruchu obrotowego poprzez sekwencyjne przełączanie cewek stojana. Wirnik wyposażony w magnesy stałe obraca się skokowo w reakcji na zmiany pola magnetycznego wytwarzanego przez cewki. Precyzja ruchu zależy od liczby cewek oraz konstrukcji mechanicznej silnika.
Sterowanie silnikiem odbywa się poprzez odpowiednie zasilanie poszczególnych cewek w określonej kolejności i czasie. Każdy krok odpowiada określonemu kątowi obrotu, który typowo wynosi 1.8° lub 0.9°. Dzięki zastosowaniu mikrokrokowania można uzyskać jeszcze większą precyzję ruchu.
Moment obrotowy silnika zależy od prądu płynącego przez cewki oraz konstrukcji mechanicznej. Silniki krokowe mogą utrzymać pozycję bez dodatkowego zasilania dzięki momentowi trzymającemu. Znajomość tych zasad jest kluczowa dla prawidłowego sterowania.
| Kryterium |
Silnik unipolarny |
Silnik bipolarny |
| Moment obrotowy |
Niższy |
Wyższy |
| Złożoność sterowania |
Prostsza |
Bardziej złożona |
| Liczba przewodów |
5-6 |
4 |
| Efektywność energetyczna |
Niższa |
Wyższa |
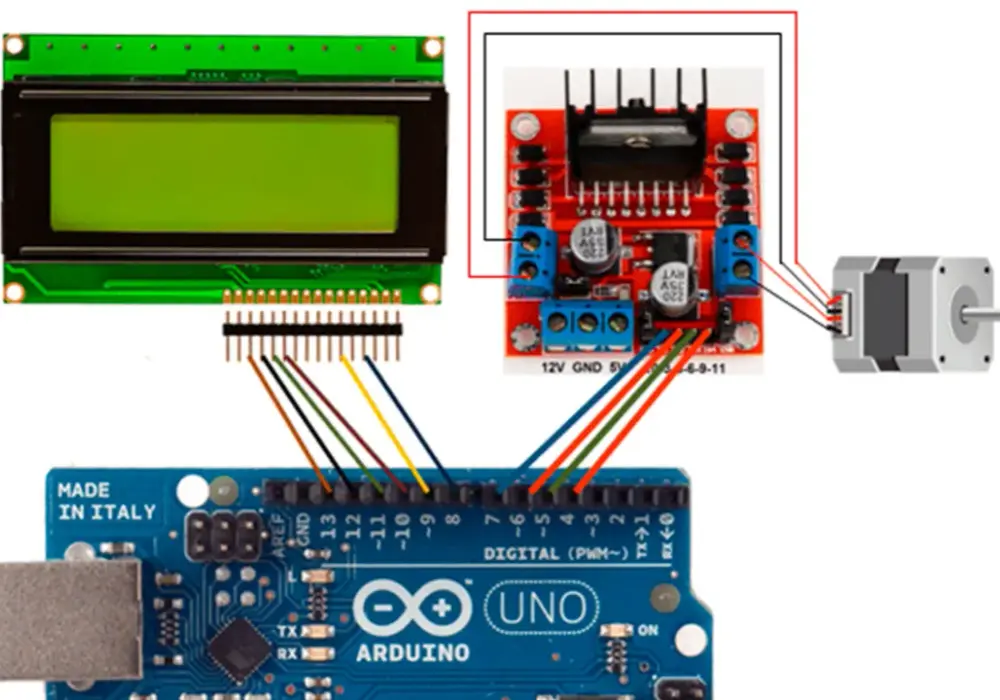
Schemat podłączenia układu
Przed rozpoczęciem montażu należy upewnić się, że wszystkie komponenty są odłączone od zasilania. Nieprawidłowe podłączenie może skutkować uszkodzeniem elementów lub porażeniem prądem.
Należy zwrócić szczególną uwagę na polaryzację zasilania oraz prawidłową identyfikację wyprowadzeń silnika. Błędne podłączenie może prowadzić do nieprawidłowej pracy lub uszkodzenia komponentów.
- 1. Podłącz sterownik do płytki Arduino (STEP -> pin 3, DIR -> pin 2)
- 2. Połącz zasilanie sterownika (VDD -> 5V, GND -> GND)
- 3. Zidentyfikuj i połącz cewki silnika krokowego ze sterownikiem
- 4. Podłącz zewnętrzne zasilanie 12V do sterownika
- 5. Ustaw potencjometr prądu odniesienia na sterowniku
- 6. Sprawdź wszystkie połączenia przed włączeniem zasilania
UWAGA: Najczęstsze błędy przy podłączaniu:
- Odwrotna polaryzacja zasilania
- Nieprawidłowe połączenie cewek silnika
- Zbyt wysokie napięcie zasilania
- Brak połączenia masy (GND)
Konfiguracja sterownika
Sterownik A4988 wymaga precyzyjnego ustawienia prądu odniesienia, który chroni
silnik krokowy przed uszkodzeniem. Wartość tę należy dobrać zgodnie z parametrami używanego silnika, typowo nie przekraczając 80% maksymalnego prądu znamionowego. Pomiar napięcia na potencjometrze sterownika pozwala precyzyjnie ustawić limit prądu.
Zworki MS1, MS2 i MS3 na sterowniku umożliwiają konfigurację trybu mikrokrokowania, co wpływa na precyzję ruchu. Prawidłowe ustawienie pinów ENABLE i RESET jest kluczowe dla poprawnego działania układu sterowania.
Mikrokrokowanie dzieli każdy pełny krok silnika na mniejsze fragmenty. Pozwala to uzyskać płynniejszy ruch i większą precyzję pozycjonowania.
Programowanie silnika krokowego
Programowanie układu
Arduino ze silnikiem krokowym rozpoczyna się od zaimportowania odpowiedniej biblioteki. Do sterowania najczęściej wykorzystuje się bibliotekę AccelStepper lub Stepper.
Konfiguracja pinów i parametrów ruchu odbywa się w funkcji setup(). Warto zdefiniować stałe określające piny STEP i DIR na początku programu.
#include
// Definicja pinów
const int stepPin = 3;
const int dirPin = 2;
// Inicjalizacja silnika
AccelStepper stepper(1, stepPin, dirPin);
void setup() {
stepper.setMaxSpeed(1000); // Prędkość maksymalna w krokach/s
stepper.setAcceleration(500); // Przyspieszenie w krokach/s^2
}
void loop() {
stepper.moveTo(200); // Obrót o 200 kroków
stepper.run(); // Wykonanie ruchu
}
Funkcja moveTo() określa docelową pozycję silnika w krokach. Funkcja run() musi być wywoływana cyklicznie w pętli głównej programu.
Sterowanie prędkością i kierunkiem
Kontrola prędkości
silnika krokowego z Arduino wymaga uwzględnienia parametrów przyspieszenia i prędkości maksymalnej. Zbyt gwałtowne zmiany tych wartości mogą prowadzić do utraty kroków lub przeciążenia silnika. Precyzyjne sterowanie wymaga zastosowania odpowiednich algorytmów rozpędzania i hamowania.
Zmiana kierunku ruchu realizowana jest poprzez zmianę stanu pinu DIR, przy czym należy pamiętać o zachowaniu odpowiednich opóźnień między zmianami kierunku. Biblioteka AccelStepper automatycznie obsługuje te zagadnienia, co znacznie upraszcza implementację.
void setMotorParams(int speed, int direction) {
stepper.setSpeed(speed); // Ustawienie prędkości
stepper.setCurrentPosition(0); // Reset pozycji
if (direction > 0) {
stepper.moveTo(1000); // Ruch w przód
} else {
stepper.moveTo(-1000); // Ruch w tył
}
}
void adjustSpeed(int newSpeed) {
stepper.setMaxSpeed(newSpeed); // Zmiana prędkości max
stepper.setSpeed(newSpeed); // Aktualna prędkość
}
Praktyczne zastosowania układu
Połączenie
Arduino i silnika krokowego znajduje szerokie zastosowanie w automatyce domowej i przemysłowej. System może być wykorzystywany do precyzyjnego pozycjonowania elementów mechanicznych, co jest kluczowe w drukarkach 3D czy ploterach. Możliwości zastosowań są praktycznie nieograniczone, od prostych projektów hobbystycznych po zaawansowane systemy przemysłowe.
Układ świetnie sprawdza się w projektach wymagających dokładnej kontroli ruchu obrotowego lub liniowego. W przypadku drukarek 3D,
silnik krokowy sterowany przez Arduino kontroluje ruch głowicy drukującej i stołu roboczego. Precyzyjne sterowanie pozwala osiągnąć wysoką jakość wydruków.
Automatyczne systemy podawania materiałów czy pozycjonowania kamer również często wykorzystują tę kombinację komponentów.
Silnik krokowy współpracujący z Arduino może być programowany do wykonywania złożonych sekwencji ruchów. Dodanie czujników krańcowych i enkoderów pozwala stworzyć zamknięty układ sterowania.
| Projekt |
Wymagania sprzętowe |
Poziom trudności |
Czas realizacji |
Dodatkowe komponenty |
| Scanner 3D |
Arduino UNO, silnik NEMA17 |
Średni |
15h |
Kamera, czujniki |
| Podajnik materiału |
Arduino NANO, silnik 28BYJ-48 |
Niski |
5h |
Konstrukcja mechaniczna |
| Teleskop automatyczny |
Arduino MEGA, silnik NEMA23 |
Wysoki |
25h |
Enkodery, wyświetlacz |
| Ploter rysujący |
Arduino UNO, 2x NEMA17 |
Średni |
20h |
Pasek zębaty, prowadnice |
| Automatyczne żaluzje |
Arduino NANO, 28BYJ-48 |
Niski |
8h |
Czujnik światła |
Rozwiązywanie typowych problemów
Utrata kroków to częsty problem, który może być spowodowany zbyt wysoką prędkością lub przeciążeniem mechanicznym. Rozwiązaniem jest zmniejszenie prędkości lub zwiększenie prądu sterowania, jeśli pozwalają na to parametry silnika.
Przegrzewanie się sterownika najczęściej wynika z nieprawidłowego ustawienia prądu odniesienia lub braku radiatora. Należy zweryfikować ustawienia prądu i zapewnić odpowiednie chłodzenie.
Nierównomierna praca silnika może być skutkiem złego połączenia przewodów lub nieprawidłowych ustawień mikrokrokowania. Sprawdzenie połączeń i konfiguracji sterownika zwykle rozwiązuje problem.
Wibracje i hałas podczas pracy często wynikają z rezonansu mechanicznego lub niewłaściwych parametrów przyspieszenia. Dostosowanie parametrów ruchu i zastosowanie elementów tłumiących może znacząco poprawić komfort pracy.
Regularna konserwacja układu
Arduino z silnikiem krokowym powinna obejmować kontrolę połączeń elektrycznych i mechanicznych. Warto również monitorować temperaturę pracy komponentów i stan elementów mechanicznych. Systematyczne przeglądy zapobiegają większości awarii.
Optymalizacja działania silnika
Odpowiednie dostrojenie parametrów mikrokrokowania pozwala znaleźć optymalny kompromis między precyzją a prędkością ruchu. Wyższe tryby mikrokrokowania zapewniają płynniejszy ruch, ale zmniejszają maksymalną prędkość i moment obrotowy. Dobór właściwego trybu zależy od konkretnego zastosowania.
Zastosowanie algorytmów przyspieszania i hamowania znacząco wpływa na dynamikę układu. Prawidłowo dobrane parametry pozwalają uniknąć utraty kroków podczas gwałtownych zmian prędkości. Funkcje biblioteki AccelStepper ułatwiają implementację zaawansowanych profili ruchu.
Optymalizacja kodu programu może znacząco poprawić wydajność całego systemu. Wykorzystanie przerwań czasowych zamiast delays() oraz minimalizacja operacji w głównej pętli programu pozwalają na płynniejsze sterowanie. Warto również rozważyć użycie buforowania komend ruchu.
Efektywne chłodzenie jest kluczowe dla długotrwałej i niezawodnej pracy układu. Radiator na sterowniku powinien być dobrany odpowiednio do generowanego ciepła. Wentylator może być konieczny przy dużych obciążeniach.
Zabezpieczenia elektryczne i mechaniczne znacząco zwiększają niezawodność systemu. Diody zabezpieczające, bezpieczniki i wyłączniki krańcowe chronią układ przed uszkodzeniem. Odpowiednie zabezpieczenia mechaniczne zapobiegają przeciążeniom.
Klucz do sukcesu: precyzyjne sterowanie i prawidłowa konfiguracja
Połączenie
Arduino i silnika krokowego otwiera szerokie możliwości w dziedzinie automatyki i robotyki, ale wymaga dokładnego zrozumienia zasad działania obu komponentów. Właściwy dobór elementów, staranne wykonanie połączeń oraz prawidłowa konfiguracja sterownika stanowią fundament udanego projektu.
Kluczem do osiągnięcia optymalnych rezultatów jest systematyczne podejście do realizacji projektu - od wyboru odpowiednich komponentów, przez dokładny montaż, aż po staranne programowanie i optymalizację parametrów pracy. Szczególną uwagę należy zwrócić na aspekty bezpieczeństwa, prawidłowe chłodzenie układu oraz regularne przeglądy techniczne.
Elastyczność platformy
Arduino w połączeniu z precyzją
silnika krokowego pozwala na realizację różnorodnych projektów - od prostych mechanizmów po zaawansowane systemy automatyki. Z odpowiednią wiedzą i doświadczeniem można skutecznie rozwiązywać typowe problemy oraz optymalizować działanie układu dla konkretnych zastosowań.